Rebecca’s Thesis Defense!
We are pleased to congratulate Rebecca Swaszek on her successful doctoral thesis defense! While she was presenting at the front of the room the atmosphere felt with an indescribable excitement, energy, and good vibes coming from her proud parents, mentors and lifelong friends.

Dr. Swaszek arrived at CODES Lab in 2014 after receiving her B.S. at Lehigh University majoring in Industrial Engineering. At her time at Boston University, she primarily focused on event-driven optimization methods for controlling and balancing mobility-on-demand systems. In particular, those related to Bike Sharing Systems and Autonomous Taxis.
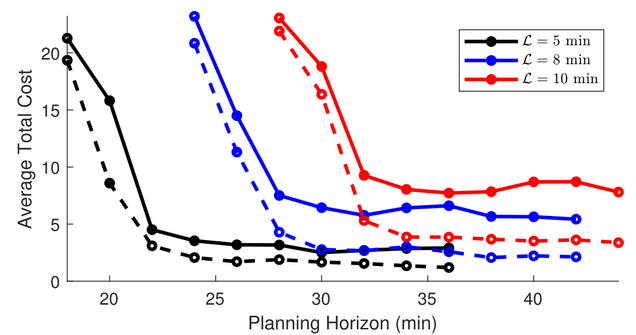
On her work on Bike Sharing Systems, she proposed and tested a novel model for solving the problem of smart and dynamic replenishing of bikes in docking stations. She introduced a Receding Horizon Controller which minimizes a user dissatisfaction metric (defined as the expected number of users unable to rent or return a bike due to a station being empty or full, respectively) by routing replenishment trucks. She modeled docking stations as M/M/1/K queues subject to time-varying birth and death rates dependent on the time of day. At each event, her controller determines the optimal truck routes over a finite planning horizon, which is then applied over a shorter action horizon. Finally, she applied her mathematical framework to analyze the Boston Bike Sharing System. To read more, please read her paper.
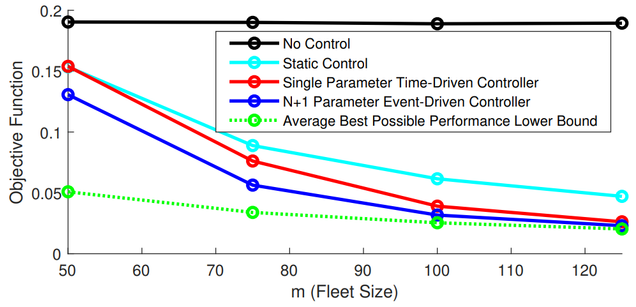
The second half of her dissertation was focused on the problem of load-balancing a fleet of autonomous taxis. The objective is to ensure customer satisfaction (Quality of Service) while minimizing the empty traveling time of taxis. To solve this problem, she proposed a parametric threshold-based control driven by the known abundance of vehicles available in and en-route to each region. This is still a difficult task for which one many researchers have utilized trial-and-error methods where multiple sample paths are generated through simulation. In contrast, she uses concurrent estimation methods to simultaneously construct multiple sample paths from a single nominal trace. She compared her threshold-based strategy to that of a simpler single-parameter controller, a state-blind static controller, a policy of no control, and a theoretically-derived lower bound. Simulation results show the improvement in performance of her technique.
Her dissertation ended with a very emotional moment, where she thanked all her friends, colleagues, mentors and family. Rebecca took a moment to dedicate her thesis to her grandmother whom she described as a highly ambitious woman, feminist fighter, and major investor in her education. This was followed by a loud applause from the audience.
Besides her academic trajectory, Rebecca interned in 2019 at the Boston Region Metropolitan Planning Organization. There, she helped implement a utility-based trip distribution model for the Boston-metro area. We wish that her futures endeavors will exceed her expectations.