Intelligent Transportation Systems
As of 2014, 54% of the earth’s population resides in urban areas, a percentage expected to reach 66% by 2050. This increase would amount to 2.5 billion people added to urban populations [1]. At the same time, there are now 28 megacities (with population ≥10 million) worldwide, accounting for 22% of the world’s urban dwellers, and projections indicate more than 41 megacities by 2030. It stands to reason that the management and sustainability of urban areas have become one of the most critical challenges our societies face today, leading to a quest for “smart” cities. Among the many functions a city supports, transportation dominates in terms of resource consumption, strain on the environment, and frustration of its citizens. Commuter delays have risen by 260% over the past 25 years and 28% of U.S. primary energy is now used in transportation [2]. It is estimated that the cumulative cost of traffic congestion by 2030 will reach $2.8 trillion [3].
Some of the projects we have addressed are listed below.
Autonomous Vehicles at Urban Traffic Intersections
-
- We address the problem of coordinating online a continuous flow of connected and automated vehicles crossing two adjacent intersections in an urban area. We present a decentralized optimal control framework whose solution yields for each vehicle the optimal acceleration/deceleration at any time in the sense of minimizing fuel consumption. The solution allows the vehicles to cross the intersections without the use of traffic lights, without creating congestion on the connecting road, and under the hard safety constraint of collision avoidance.
Related Publications
A. Malikopoulos, C. Cassandras, and Y. Zhang. A Decentralized Optimal Control Framework for Connected and Automated Vehicles at Urban Intersections. Automatica, vol. 93, pp. 244-256, 2018.
Y. Zhang, C. G. Cassandras. A decentralized optimal control framework for connected automated vehicles at urban intersections with dynamic resequencing. In 57th IEEE Conference on Decision and Control (CDC), pp. 217-222, 2018.
Y. Zhang, and C. Cassandras. The Penetration Effect of Connected Automated Vehicles in Urban Traffic: an Energy Impact Study. In 2nd IEEE Conference on Control Technology and Applications (CCTA), pp. 620-625, 2018.
B. Li, Y. Zhang, Y. Zhang, et al. Near-Optimal Online Motion Planning of Connected and Automated Vehicles at a Signal Free and Lane-Free Intersection: A Two-Stage Approach. In 29th IEEE Intelligent Vehicles Symposium (IV), pp. 1432-1437, 2018.
Traffic Light Control
-
- The Traffic Light Control (TLC) problem involves dynamically adjusting roads’ green and red light cycle lengths in order to control the traffic flow through an intersection. Its main objective is to minimize the congestion of the urban perimeter within which is located. Today, 99% of the traffic lights in transportation systems are controlled by
Fixed-Cycle
-
- strategies (NTS, 2007). However,
Traffic-responsive
-
- strategies are now promising given the rise of Vehicle-to-Infrastructure (V2I) technologies. The Multi-Intersection TLC involves controlling the traffic lights over a transportation network. This problem has proved to be NP-complete.
In order to tackle the Multi-Intersection TLC. Chen extended the literature using the Stochastic Flow Model (SFM) by Geng & Cassandras 2012 and adding delays. These delays allow vehicles to travel within a road without being part of the intersection queue. Using Infinitesimal Perturbation Analysis (IPA) for this SFM with delays he derived an online gradient estimate for different cost metrics. These IPA estimators together with a gradient-based method are used to iteratively adjust the light cycle lengths to improve the intersection performance.
He implemented this technique to a small robot urban environment at the CODES Lab.
Related Publications
Geng, Yanfeng, and Christos G. Cassandras. “Traffic light control using infinitesimal perturbation analysis.”2012 IEEE 51st IEEE Conference on Decision and Control (CDC). IEEE, 2012.
Chen, Rui, and Christos G. Cassandras. “Stochastic Flow Models with Delays and Applications to Multi-Intersection Traffic Light Control.” IFAC-PapersOnLine 51.7 (2018): 39-44.
Ride Sharing Systems
-
- The assignment of passengers to a fleet of vehicles in Ride Sharing System (RSS) is an exiting Combinatorial Problem. The problem involves a real-time optimization of assigning incoming passengers to vehicles as well as defining the routing strategy for each fleet’s vehicle. As available information, it considers the origin-destination location of passengers and, the capacity and position of vehicles. To address this problem, we are currently using a Receding Horizon Control (RHC) strategy. This event-driven online model helps to reduce the complexity of the problem by defining a limited event-horizon to search. As a result of his project, we reduce the waiting and traveling time of passengers by more than 50%.
Related Publications
Chen, Rui, and Christos G. Cassandras. “Optimization of Ride Sharing Systems Using Event-driven Receding Horizon Control.” arXiv preprint arXiv:1901.01919 (2019).
Lane Change Maneuvers
-
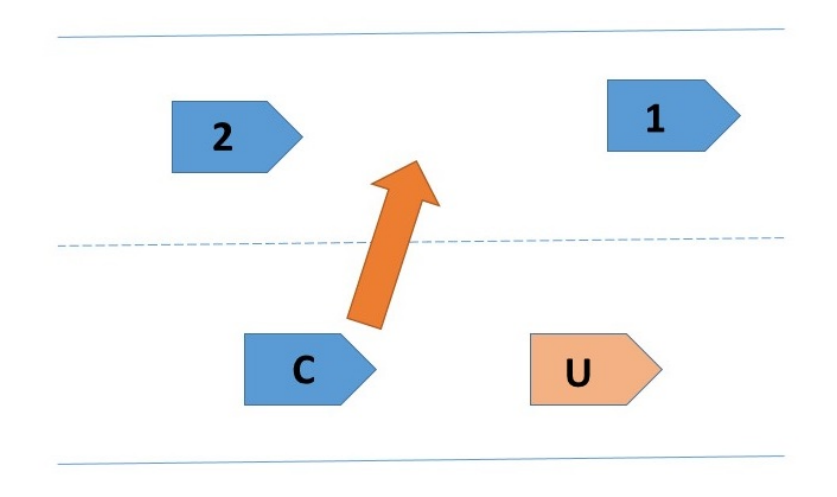
- Lane Change Maneuvers intend to solve the problem of optimally and automatically control lane change maneuvers in highways. The idea is that the target vehicle cooperates with other autonomous vehicles to complete a lane change. In this context, we aim to optimize the maneuver time by using an optimal control framework that minimizes the energy consumption not only for the target vehicle but for all controllable vehicles in the process.
Related Publications
Chen, Rui, Christos G. Cassandras, and Amin Tahmasbi-Sarvestani. “Time and Energy Optimal Lane Change Maneuvers for Cooperating Connected Automated Vehicles.” arXiv preprint arXiv:1902.08121 (2019).
B. Li, Y. Zhang, Y. Zhang, et al. Cooperative Lane Change Motion Planning of Connected and Automated Vehicles: A Stepwise Computational Framework. In 29th IEEE Intelligent Vehicles Symposium (IV), pp. 334-338, 2018. (Best Paper/Best Student Paper Finalists)
Optimal Merging Control for CAVs
-
- This research is about the optimal control of Connected and Automated Vehicles (CAVs) arriving from two curved roads at a merging point where the objective is to jointly minimize the travel time, energy consumption, and the passenger discomfort of each CAV. The solution guarantees that a speed-dependent safety constraint and a lateral rollover avoidance constraint are always satisfied, both at the merging point and everywhere within a control zone which precedes it. Read more here
Human driven vehicles at a merging scenario of the highway I-90 (known as The Massachusetts Turnpike), USA.
CAVs with the joint optimal control and control barrier function method (Automatica: 123.109333, 2021).
Related Publications
Huile Xu, Wei Xiao, Christos G Cassandras, Yi Zhang, Li Li. “A General Framework for Decentralized Safe Optimal Control of Connected and Automated Vehicles in Multi-Lane Intersections”. Submitted to IEEE Transactions on Intelligent Transportation Systems (2019).
Wei Xiao and Christos G. Cassandras. Decentralized optimal merging control for connected and automated vehicles with safety constraints guarantees. Automatica, Volume 123, 109333, 2021.
Social Routing
-
- We study the problem of routing Connected and Automated Vehicles (CAVs) in the presence of mixed traffic (coexistence of regular vehicles and CAVs). In this setting, we assume that all CAVs belong to the same fleet, and can be routed using a centralized controller. The routing objective is to minimize a given overall fleet traveling cost (travel time or energy consumption). We assume that regular vehicles (non-CAVs) choose their routing decisions selfishly to minimize their traveling time. We propose an algorithm that deals with the routing interaction between CAVs and regular uncontrolled vehicles.
The results suggest that collaborative routing decisions of CAVs improve not only the cost of CAVs, but also that of the non-CAVs. Furthermore, even a small CAV penetration rate can ease congestion for the entire network.
[1] “World’s Population Increasingly Urban With More Than Half Living in Urban Areas,” Report on World Urbanization Prospects, United Nations Department of Economic and Social Affairs, Jul. 2014. [Online]. Available: http://www.un.org/en/ development/desa/news/population/worldurbanization-prospects-2014.html
[2] D. Shrank, T. Lomax, and B. Eisele, “The 2011 urban mobility report,” Texas A&M Transp. Inst., Tech. Rep., 2011. [Online]. Available: https://nacto.org/docs/usdg/2011_ urban_mobility_report_schrank.pdf
[3] INRIX, “Economic and environmental of traffic congestion in Europe and the U.S.,” 2015. [Online]. Available: http://www.inrix. com/economic-environment-costcongestion/