Smart Transportation in Megacities
Daily commuters have experienced the exhausting frustration of traffic congestion during rush hours. Our research group aims to reduce traffic congestion and its effects, including harmful emissions, by developing efficient traffic control and routing strategies for Connected Autonomous Vehicles (CAVs) in a smart city environment.

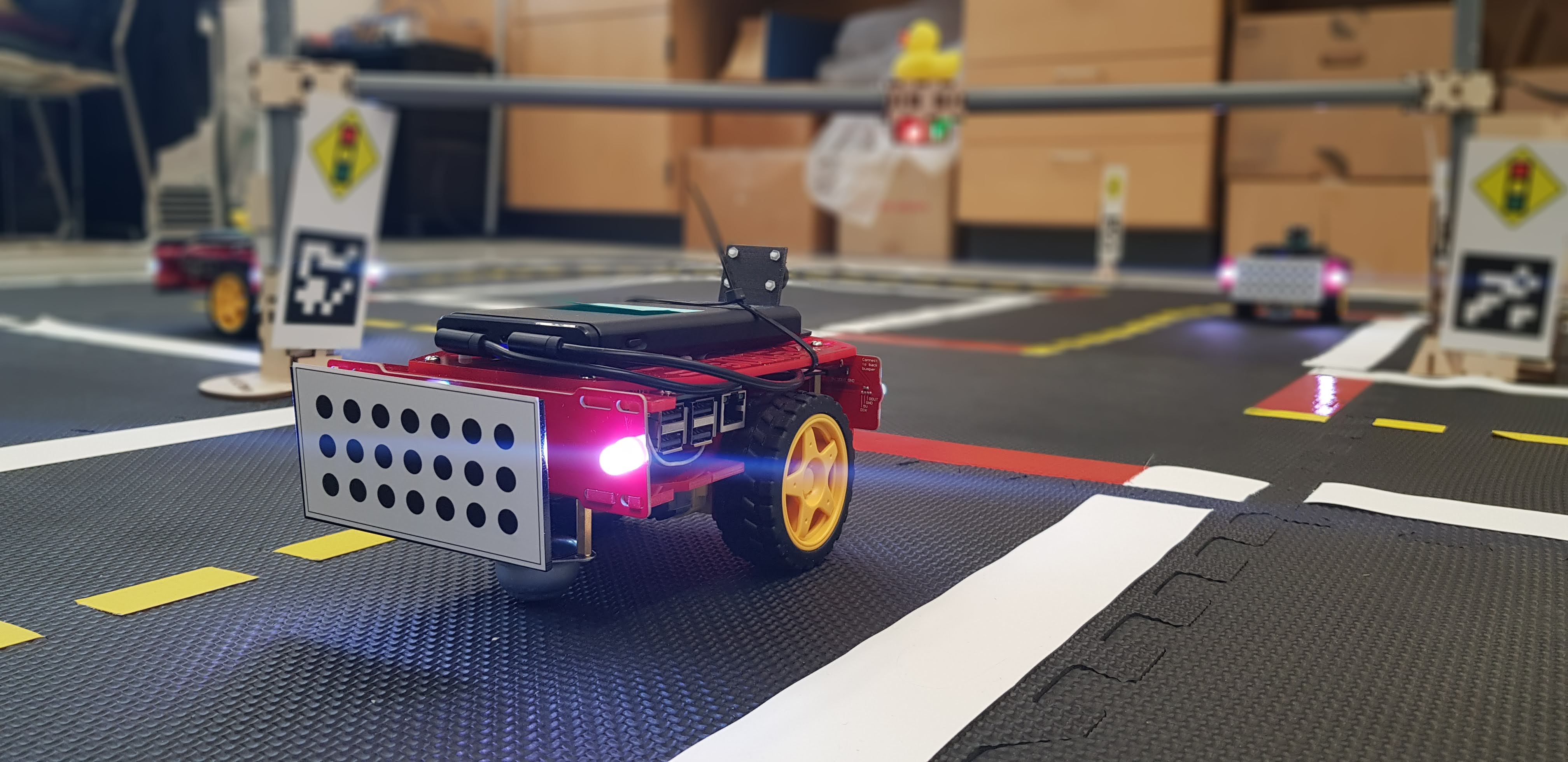
Powered by Linux, Docker, and ROS, our current Duckietown infrastructure (Mega-city environment) simulates traffic in a Smart City. Robots (cars) are controlled in order to run autonomously and to communicate with the transportation system (vehicle to vehicle, vehicle to infrastructure). Traffic lights are installed at selected intersections and its red/green cycles can be remotely controlled using real-time traffic information of the system. The objective is to reduce the energy consumption of cars at intersections caused by unnecessary stops. Future work includes implementing the existing algorithms developed at the CODES lab (lane changing, merging strategies, and optimal routings) to this Duckietown simulation environment.