Robotic Urban-Like Environment (RULE)
Robotic Urban-Like Environment (RULE) Generation I
RULE is an experimental platform for automatic deployment of robotic cars in an urban-like environment. The cars are Khepera II and Khepera III miniature robots with processing, sensing, and communication capabilities. The “city” has streets, intersections, traffic lights, and parking spots, and can be easily reconfigured. Four overhead cameras, serving as a GPS, are used to produce a topological map of the environment.
![CODES no obstacle[(001285)06-16-04]](/codes/files/2012/01/CODES-no-obstacle00128506-16-041.jpg "CODES no obstacle[(001285)06-16-04]") |
 |
The image of the entire platform is obtained by stitching images taken from four overhead cameras. The camera is Logitech QuickCam Communicate STX. RULE I Vision System
 |
 |
Khepera II and Khepera III robots from K-team, with Wifi or Bluetooth communication. Surrounded infrared and ultrasonic sensors can be used to do short distance obstacle detection. Khepera III can run Linux onboard. RULE I Robots

Khepera II |

Khepera III |
RULE I Traffic Light
Each traffic light in RULE I has an IP address and is connected to a route.
 |
Robotic Urban-Like Environment (RULE) Generation II
Comparing to old RULE platform, we made the following upgrades. First, traffic lights can be controlled wirelessly. Second, parking barriers coming with LED signs are installed at the parking spots, which are wirelessly controllable. The LED signs are used to indicate the parking spot status (vacant, occupied, reserved, etc). Third, use two instead of four overhead cameras as a vision system.
 |
 |
The image of the entire platform is obtained by stitching images taken from two overhead cameras. The cameras are Logitech QuickCam Orbit AF. RULE II Vision System
 |
 |
We add to the platform a new robot. It is an upgraded Roomba vacuum cleaner with brains (laptop), eyes (camera) and sensors (laser rangefinder and infrared sensors) RULE II Robots
 |
Traffic lights in RULE II are controlled wirelessly. Parking barriers with LED display are added into the platform. The following videos show how all components work.
RULE II Traffic Components
Robotic Urban-Like Environment (RULE) Generation III
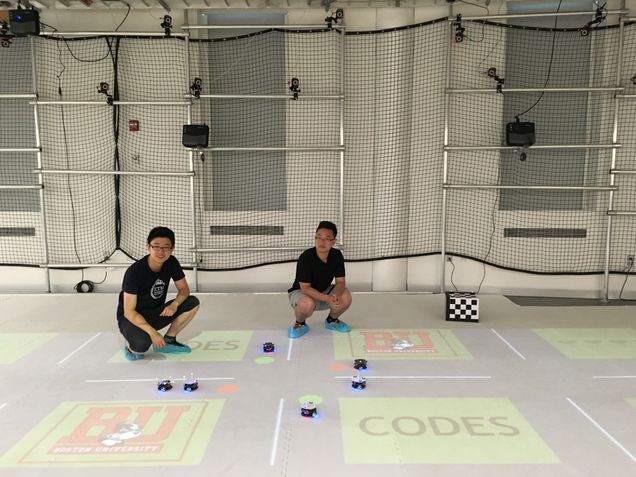
We recently update our platform to generation III which uses OptiTrack Motion Capture systems of 40 high-speed cameras providing 6DOF data (x,y,z, pitch, yaw, roll) in real time. City environments could be projected on the floor as backgrounds while robots navigation through buildings and intersections. Robotic Urban-Like Environment (RULE) Generation III
RULE III Robots
In our third generation, we use M3pi robots from Pololu, with wixel wireless communication and Arm embed controller. The robots can also be equipped with multiple sensors including range finders, IMU, cameras, and color/light sensors.
