Rui Chen Prospectus Defense
Two days ago, Rui Chen defended his Thesis proposal on Control and Optimization Methods for problems in Intelligent Transportation Systems (ITS). He began introducing ITS and it impacts on society by motivating the audience with the fact that the cost of commuter delays has risen by 260% over the past 25 years (Urban Mobility Report, 2011). In particular, he addressed three main problems in improving transportation systems.
Traffic Light Control
The Traffic Light Control (TLC) problem involves dynamically adjusting roads’ green and red light cycle lengths in order to control the traffic flow through an intersection. Its main objective is to minimize the congestion of the urban perimeter within which is located. Today, 99% of the traffic lights in transportation systems are controlled by Fixed-Cycle strategies (NTS, 2007). However, Traffic-responsive strategies are now promising given the rise of Vehicle-to-Infrastructure (V2I) technologies. The Multi-Intersection TLC involves controlling the traffic lights over a transportation network. This problem has proved to be NP-complete.
In order to tackle the Multi-Intersection TLC. Chen extended the literature using the Stochastic Flow Model (SFM) by Geng & Cassandras 2012 and adding delays. These delays allow vehicles to travel within a road without being part of the intersection queue. Using Infinitesimal Perturbation Analysis (IPA) for this SFM with delays he derived an online gradient estimate for different cost metrics. These IPA estimators together with a gradient-based method are used to iteratively adjust the light cycle lengths to improve the intersection performance.
He implemented this technique to a small robot urban environment at the CODES Lab.
Ride Sharing Systems
The assignment of passengers to a fleet of vehicles in Ride Sharing System (RSS) is an exiting Combinatorial Problem. The problem involves a real-time optimization of assigning incoming passengers to vehicles as well as defining the routing strategy for each fleet’s vehicle. As available information, it considers the origin-destination location of passengers and, the capacity and position of vehicles. To address this problem, Chen used a Receding Horizon Control (RHC) strategy. This event-driven online model helps to reduce the complexity of the problem by defining a limited event-horizon to search. As a result of his project, he was able to reduce the waiting and traveling time of passengers by more than 50%.
He used SUMO as the simulation environment to test his algorithm. Here a little video of what he did.
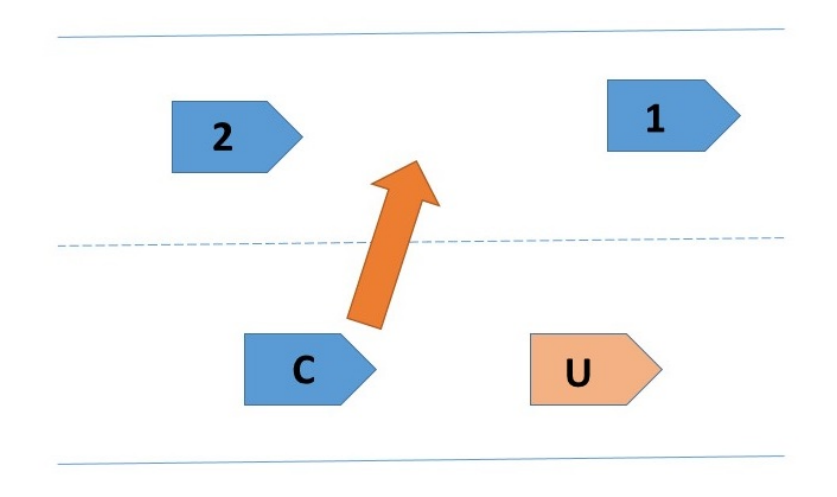
Lane Change Maneuvers
Lane Change Maneuvers intend to solve the problem of optimally and automatically control lane change maneuvers in highways. The idea is that the target vehicle cooperates with other autonomous vehicles to complete a lane change. In this context, Rui aims to optimize the maneuver time by using an optimal control framework that minimizes the energy consumption not only for the target vehicle but for all controllable vehicles in the process.
Related Publications
Geng, Yanfeng, and Christos G. Cassandras. “Traffic light control using infinitesimal perturbation analysis.” 2012 IEEE 51st IEEE Conference on Decision and Control (CDC). IEEE, 2012.
Chen, Rui, and Christos G. Cassandras. “Stochastic Flow Models with Delays and Applications to Multi-Intersection Traffic Light Control.” IFAC-PapersOnLine 51.7 (2018): 39-44.
Chen, Rui, and Christos G. Cassandras. “Optimization of Ride Sharing Systems Using Event-driven Receding Horizon Control.” arXiv preprint arXiv:1901.01919 (2019).
Chen, Rui, Christos G. Cassandras, and Amin Tahmasbi-Sarvestani. “Time and Energy Optimal Lane Change Maneuvers for Cooperating Connected Automated Vehicles.” arXiv preprint arXiv:1902.08121 (2019).