Sabelhaus Research: Advancing the Safety of Soft Robots for Human Interactions
The emergence of soft robots will enable safe human interactions which will allow robots to assist in the industrial, medical, automotive and space industries. College of Engineering Professor Andrew Sabelhaus (ME, SE), has been working on making soft robots safer to improve these human interaction tasks, in areas such as medicine, as well as explore difficult or dangerous locations. His work will help improve the design of many other soft robots.

Sabelhaus’ research takes a control-oriented approach to the locomotion of soft and flexible robots, spanning problems in modeling, feedback, and mechanical design. As Director of the new Soft Robotics Control Lab in the Department of Mechanical Engineering at Boston University, Sabelhaus leads research in combining computational intelligence with embodied intelligence to create robots. An area of focus for Sabelhaus and his team is advancing automation and control functions to improve safety.
In the past, soft-robot locomotion has been limited to open-loop motion, meaning there is no feedback and the robot will run its course. Sabelhaus gave the example of an open-loop autonomous vehicle driving without taking into consideration its environment, compared to a closed-loop vehicle stopping for pedestrians.
Ideally, soft robots will be able to have closed-loop motion to prevent harm to the robot itself and harm to humans interacting with the robot. In order to achieve this goal, Sabelhaus and his team created a supervisory controller that has the potential to make soft robot actuators (the limbs of the robot) more reliable and safe during practical use. Essentially, the supervisory controller tells the robot when to stop when it’s about to overheat or break. Read more about the supervisory controller in his paper titled “Safe Supervisory Control of Soft Robot Actuators.”
Sabelhaus and his team verified and tested the supervisory controller system on a robot called Horton, which is the first framework and experimental validation of full pose control with any verifiable safety for any soft legged robot.
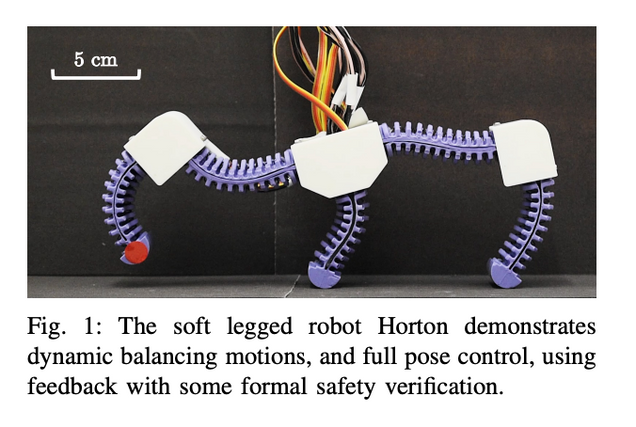
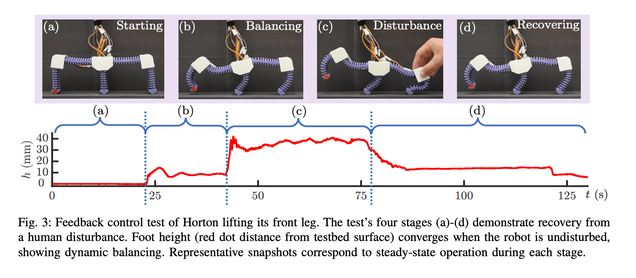
Horton can balance on two of its three legs even when a human pushes on it to create a disturbance. Improving the balance of soft robots will allow them to encounter unstructured environments and unanticipated disturbances.
“Although soft robots are safer in interacting with the environment compared to traditional robots, they still have the potential to degrade and get damaged during unanticipated contact,” Sabelhaus said.
Oftentimes, the “muscles” in these soft robots will overheat, which can cause fire risks, human burns, and the robot to completely shut down. If a robot becomes too hot, mechanical cycling may happen. This is when the limb is stretched beyond repair; similar to tearing a muscle.
In a paper titled “Safe Balancing Control of a Soft Legged Robot,” Salbelhaus and his team used three tests to verify the supervisory controller kept Horton safe. The first test was a physical barrier, such as a wall. They found when Horton encountered the wall, it tried to push against it causing the robot to overheat without the supervisor. The second test was pushing on the robot to prevent the limb from taking on the pose with the desired angle. Horton could either try to push the hand away or maintain the angle that it’s at. When Horton tried to push the hand away, it overheated. The team programmed Horton to maintain the pose it was limited to. The third test was human imitation. Using the supervisory controller, Horton would not complete a motion where it would have injured itself.
Currently, Horton is connected to a computer that calculates how much to heat up the robot’s muscles. That information is sent to a separate circuit to apply the heat. Sabelhaus said one of the longer-term goals is to consolidate those steps into a smaller package that can be placed on the robot.
His goal is to build soft robots in new and different ways that allow humans to tackle problems to make the world better.
“I hope my work will improve medical care, or aid in search and rescue missions through reaching difficult locations that involve crawling into collapsed buildings,” Sabelhaus said. “For me, that’s really motivating.”