The
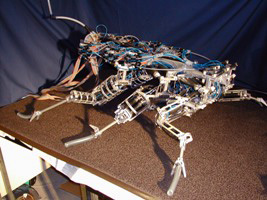
off-road robo-roach
Page 3
 Koditschek,
working with Full, found that when a cockroach runs, its legs,
though jointed, act like pogo-sticks. So, the team built their
robot with six unjointed, C-shaped, flexible plastic rods for
legs, which act as the machine’s shock absorbers. Each leg
is powered by a motor, which spins the leg alongside the body
like a one-spoked wheel. The legs hit the ground in the classic
cockroach tripod gait and then swing over the shoulder to come
down again. The resulting robot looks like a four-year-old’s
drawing of a cockroach – a rectangle two-feet long with
six sticks coming off it. Using a cockroach-inspired walk and
suspension system, it runs stably over rocky ground, through vegetation,
and can climb stairs. Koditschek,
working with Full, found that when a cockroach runs, its legs,
though jointed, act like pogo-sticks. So, the team built their
robot with six unjointed, C-shaped, flexible plastic rods for
legs, which act as the machine’s shock absorbers. Each leg
is powered by a motor, which spins the leg alongside the body
like a one-spoked wheel. The legs hit the ground in the classic
cockroach tripod gait and then swing over the shoulder to come
down again. The resulting robot looks like a four-year-old’s
drawing of a cockroach – a rectangle two-feet long with
six sticks coming off it. Using a cockroach-inspired walk and
suspension system, it runs stably over rocky ground, through vegetation,
and can climb stairs.
Engineers at Stanford chose
a design that takes the cockroach model a little more literally.
Though the robot’s legs are, like the Michigan lab’s
model, simple jointless pogo-sticks, its swinging stride and elastic
hip joints mimic those of an actual cockroach.
Each of the robot’s
legs is a pneumatic piston (a rod that moves within a nearly air-tight
tube, like the motion damper on the top of many school and church
doors), which, when filled with air, pushes its inner rod down
and back, moving the robot forward. The legs themselves aren’t
flexible, but a constant air pressure maintained in the hollow
piston tube absorbs shocks and gives the legs their springiness.
The robot has another shock
absorber in its hip, which Mark Cutkosky, the mechanical engineering
professor who runs Stanford’s cockroach robot lab, and his
team designed about four years ago. Roach hips contain resilin,
the highly elastic material that launches fleas on their epic
jumps, explains cockroach biologist Ritzmann.The
resilin stretches during the backswing of the step and springs
the leg forward again when the roach lifts its foot. Cutkosky’s
team’s robot has a soft polyurethane hip joint that works
the same way, automatically springing the legs back into stepping
position after each tripod step.The
hip-spring saves energy and is tuned to give the six-inch long
robot, which can climb over obstacles as tall as its hip and run
up to 2.5 body lengths per second, an extra degree of stabilizing
suspension.
|
