The
off-road robo-roach
Page 2
 Through
these cockroach calisthenics and some more invasive physiological
studies, Full and other roach biologists have discovered that
cockroaches can run just as easily over uneven ground as they
can on a kitchen floor. This is in part due to the inherent stability
of having six legs to stand on (a big advantage over a two-legged
or four-wheeled design if one of your legs or wheels is damaged).
A roach runs using what scientists call an alternating tripod
gait, explains Fred Delcomyn, an entomology professor at the University
of Illinois. The front and back legs on one side of the body and
the middle leg on the other move together. So with each three-legged
step, the cockroach is poised on top of a triangle of supports
like a tiny footstool. Compare this to a human step, in which
only one leg on one side of the body is touching the ground at
a given time, and the implications for stability are clear. Through
these cockroach calisthenics and some more invasive physiological
studies, Full and other roach biologists have discovered that
cockroaches can run just as easily over uneven ground as they
can on a kitchen floor. This is in part due to the inherent stability
of having six legs to stand on (a big advantage over a two-legged
or four-wheeled design if one of your legs or wheels is damaged).
A roach runs using what scientists call an alternating tripod
gait, explains Fred Delcomyn, an entomology professor at the University
of Illinois. The front and back legs on one side of the body and
the middle leg on the other move together. So with each three-legged
step, the cockroach is poised on top of a triangle of supports
like a tiny footstool. Compare this to a human step, in which
only one leg on one side of the body is touching the ground at
a given time, and the implications for stability are clear.
The other key to cockroach
stability is their natural springiness. Their flexible muscles,
joints and exoskeleton act like the shock absorbers in a tiny,
perfectly tuned car suspension system. According to Full, if a
running roach is pushed or steps in a hole or on a pebble, its
spring-like legs will give, then push back against the ground,
restoring the insect’s equilibrium before it loses its balance.
The adjustment is a completely automatic structural act; it happens
so fast (10 milliseconds) that the cockroach’s nervous system
never even has time to get involved.
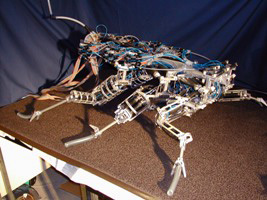
Using this growing knowledge
of the mechanics of cockroach motion, several groups of engineers
across the country are designing and building off-road roach robots.
Early in the design process, each group faced a fundamental decision:
how closely should their robot’s design mimic the body of
an actual cockroach?
Not
very closely at all, according to Daniel Koditschek, an electrical
engineering professor at the University of Michigan and the head
of that school’s robo-roach project, which began in 1998.
Cockroaches, after all, have structures involved in reproduction
and feeding (like arms jointed to bring food to the mouth) that
a robot would never need. So Koditschek and his collaborators
reduced the cockroach to its most fundamental locomotory principles
to build a simple, but effective, robot.
|
