Simulation of the Lung Environment for Validation of Soft Robot Bronchoscopy
Project Description
Lung cancer remains as the leading cause of cancer-related deaths in the United States due to the difficulty to treat and diagnose early-stage lung tumors. The main reason for this difficulty is that during a bronchoscopy procedure the surgeon must navigate tortuous paths to the periphery of the lung where early tumors form. The flexibility offered by soft robots make them inherently safe for interacting with tissue and allow for the creation of dexterous degrees of freedom which can be used to ease navigation into these regions of the lung. This project will focus on creating validation rigs for use in ex-vivo experiments with a previously developed soft robot. The validation rigs must account for tissue deformability and breathing motion in the lungs without hindering normal operation of the robot. Breathing motion will be simulated through tissue displacement and the control of pressure in a closed environment. The validation rig will be configurable to suit potential differences in the frequency of breathing. Two validation rigs are envisioned for this project which will assess both the ability to interact with in-vitro simulated tissue and ex-vivo tissue through soft robotic biopsy tools and the ability of the soft robot to navigate through the tortuous paths of the lungs. The main goal of this project is to capture the dynamic environment of the lungs in actual bronchoscopy procedures.
Mentor
| Sheila Russo, PI | Daniel Van Lewen |
|
|
|


Research Goals
Learning Goals
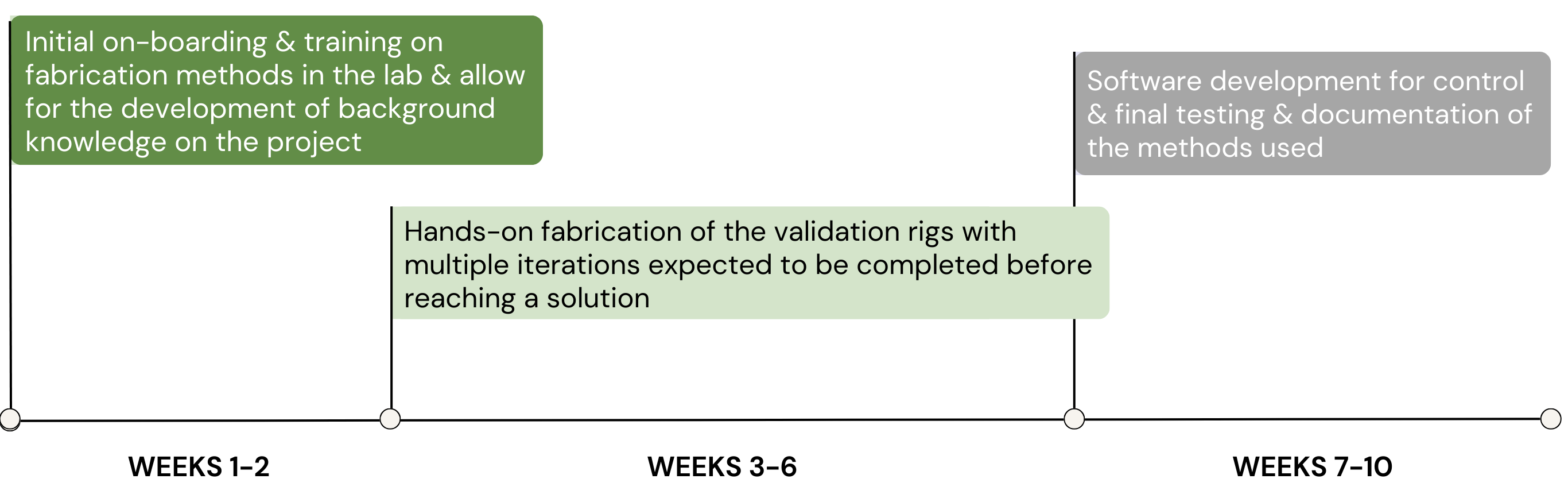
Timeline