|
 |

PROJECTS
|
|
|
|
|
|
|
| |
Mitral Valve Repair
Performing repairs inside the beating heart is difficult in terms of both instrumentation and imaging. While structural intracardiac repair is currently a hot area for medical startups, proposed catheters and devices do not approach the level of effectiveness that is currently possible during open-heart surgery. The goal of this project is to develop technology for beating-heart repairs in the context of mitral valve prolapse. [Read More] |
|
 |
|
|
Mitral Valve Repair
Genevieve Laing
Performing repairs inside the beating heart is difficult in terms of both instrumentation and imaging. While structural intracardiac repair is currently a hot area for medical startups, proposed catheters and devices do not approach the level of effectiveness that is currently possible during open-heart surgery. The goal of this project is to develop technology for beating-heart repairs in the context of mitral valve prolapse. The project encompasses patient-specific modeling of the mitral valve, repair planning and optimization; and the design of a single, multifunctional instrument for catheter-based repair. Valve repair may involve, for example, attaching artificial chordae tendinae between the valve leaflets and papillary muscles. Design of such a catheter-based device will focus on four main surgical functions: capturing the leaflet margin, anchoring chords, adjusting the chords to optimal lengths, and securing the final chord orientations. [Reduce]
|
|
 |
|
|
Return to Top |
Concentric Tube Robots
Minimally invasive medical procedures involve the manipulation of sensors, tools and prosthetic devices inside the body while minimizing damage to surrounding tissue structures. In many cases, navigation to the surgical site involves steering the delivery instrument along three-dimensional curves through tissue to avoid bony or sensitive structures (percutaneous procedures), or following the interior contours of a body orifice (e.g., the nasal passages) or body cavity (e.g., the heart). Once at the surgical site, it is often necessary to control the position and orientation of the instruments distal tip while holding relatively immobile the proximal inserted length. A novel approach to constructing robots for such applications is based on concentrically combining pre-curved elastic tubes. [Read More] |
|
  |
|
|
Concentric Tube Robots
Jesse Lock,
Andrew Gosline
Minimally invasive medical procedures involve the manipulation of sensors, tools and prosthetic devices inside the body while minimizing damage to surrounding tissue structures. In many cases, navigation to the surgical site involves steering the delivery instrument along three-dimensional curves through tissue to avoid bony or sensitive structures (percutaneous procedures), or following the interior contours of a body orifice (e.g., the nasal passages) or body cavity (e.g., the heart). Once at the surgical site, it is often necessary to control the position and orientation of the instruments distal tip while holding relatively immobile the proximal inserted length.
A novel approach to constructing robots for such applications is based on concentrically combining pre-curved elastic tubes. By rotating and extending the tubes with respect to each other, their curvatures interact elastically to position and orient the robots tip, as well as control the robots shape along its length. In this approach, the flexible tubes comprise both the links and the joints of the robot. Since the actuators attach to the tubes at their proximal end, the robot itself forms a slender curve that is well suited for minimally invasive medical procedures. Our research encompasses the design, modeling and real-time control of this robot technology. We are also designing tip-mounted actuated tools for beating-heart intracardiac surgery.
This technology can be licensed from Boston University.
|
|
 |
|
References:
P. Dupont, J. Lock and E. Butler, "Torsional Kinematic Model for Concentric Tube Robots," Proceedings of 2009 IEEE International Conference on Robotics and Automation, May 12 - 17, 2009, Kobe, Japan.
P. Sears and P. Dupont, "Inverse Kinematics of Concentric Tube Steerable Needles." IEEE Int. Conf. Robotics & Automation. Rome, Italy, 10-14 April, 2007.
P. Sears and P. Dupont, "A Steerable Needle Technology Using Curved Concentric Tubes." IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2006), Beijing, China, October 9-15, 2006.
[Reduce]
|
|
|
Return to Top |
Kinematic Control of Flexible Robots
Cartesian control and, in particular, impedance control of a snake-like flexible manipulator requires considering the effect of manipulator flexion on both the kinematic mapping and the force mapping between the Cartesian space and the joint space of the manipulator. This research introduces a model-based impedance controller that uses a force-deflection manipulator model to implement a desired impedance at the tip of the manipulator. [Read More] |
|
 |
|
|
Kinematic Control of Flexible Robots
Mohsen Mahvash
Cartesian control and, in particular, impedance control of a snake-like flexible manipulator requires considering the effect of manipulator flexion on both the kinematic mapping and the force mapping between the Cartesian space and the joint space of the manipulator. This research introduces a model-based impedance controller that uses a force-deflection manipulator model to implement a desired impedance at the tip of the manipulator. The measured tip position of the manipulator is used to calculate the desired tip force for the desired impedance. The desired tip force is then mapped to the joint positions of the manipulator using the tip force-deflection model. The latter mapping is accomplished by computing the desired joint positions that deform the flexible part of the manipulator so as to generate the desired tip force. Then position-tracking controllers are used to obtain the actuator torques that create the desired joint positions. When tip force magnitudes or directions are such that manipulator deflection is of the same scale as tip position measurement noise, tip forces are instead directly mapped to the joint torques using an energy-based mapping that considers the effect of manipulator flexion. The proposed impedance controller is illustrated for a concentric tube robot constructed from a set of precurved superelastic tubes. The equilibrium special Cosserat rod model is used to obtain the force-deflection model of the robot in real time. Simulation results show that the impedance controller provides the desired impedance independent of robot flexibility. We are currently implementing the impedance controller for a concentric tube robot.
|
|
 |
|
References:
M. Mahvash and P. Dupont, "Fast Needle Insertion to Minimize Tissue Deformation and Damage," Proceedings of 2009 IEEE International Conference on Robotics and Automation, May 12 - 17, 2009, Kobe, Japan.
M. Mahvash and P. Dupont, "Bilateral Teleoperation of Flexible Surgical Robots." New Vistas and Challenges in Telerobotics Workshop, IEEE 2007 International Conference on Robotics & Automation, Pasadena, CA, 19-23 May, 2008.
M. Mahvash, and P. E. Dupont, "Impedance control of a snake-like flexible manipulator," IEEE Transactions on Robotics, submitted
[Reduce]
|
|
|
Return to Top |
MEMS Fabricated Minimally Invasive Surgical Instruments
While tools for minimally invasive surgery are often needed at the millimeter scale, most manufacturing technologies are not well suited to this length scale. In this research, we are teaming with Microfabrica, Inc. to design and test a toolbox of devices and implants for tissue removal and approximation in intracardiac surgery. [Read More] |
|
 |
|
|
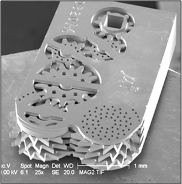
MEMS Surgical Instruments
Evan Butler
While tools for minimally invasive surgery are often needed at the millimeter scale, most manufacturing technologies are not well suited to this length scale. In this research, we are exploring the practicality of using a metal microelectromechanical systems (MEMS) technology for constructing devices for surgery inside the heart. In this approach, wafer-scale batch processing can produce fully-assembled devices composed of traditional mechanical components such as gears, screws and springs. We are teaming with Microfabrica, Inc. to design and test a toolbox of devices and implants for tissue removal and approximation in intracardiac surgery. In addition to the practical aspects of this project, we are also conducting experiments to characterize tissue machining processes and to identify the relevant variables. Based on our analyses, we will construct a fundamental tissue machining model and employ it in device design optimization. [Reduce]
|
|
 |
|
|
Return to Top |
Modeling of Needle Cutting
During needle-based procedures, transitions between tissue layers often involve rupture events that produce substantial deformation and tend to drive the needle off course. In this research, we analyze the mechanics of these rupture events during the insertion a sharp needle in an inhomogeneous tissue. [Read More] |
|
 |
|
|
Modeling of Needle Cutting
Mohsen Mahvash
During needle-based procedures, transitions between tissue layers often involve rupture events that produce substantial deformation and tend to drive the needle off course. In this research, we analyze the mechanics of these rupture events during the insertion a sharp needle in an inhomogeneous tissue. The force-deflection curve of the needle prior to a rupture event is modeled by a nonlinear viscoelastic Kelvin model and a stress analysis is used to predict the relationship between rupture force and needle velocity. The model predicts that the force-deflection response of the needle is steeper and the tissue absorbs less energy when the needle moves faster. The force of rupture also decreases for faster insertion under certain conditions. The observed properties are sufficient to show that maximizing needle velocity minimizes tissue deformation and damage, and consequently, results in less needle insertion position error. The model predicts that tissue deformation and absorbed energy is reduced up to a critical insertion velocity which is inversely proportional to the relaxation time of the tissue.
|
|
 |
|
References:
M. Mahvash, and P. E. Dupont, "Mechanics of dynamic needle insertion into a biological material," IEEE Transactions on Biomedical Engineering, submitted.
[Reduce]
|
|
|
Return to Top |
3D Ultrasound Guided Intracardiac Surgery
Many investigators now recognize that cardiopulmonary bypass (CPB) poses significant risks to the patient. Recognition of the problems with traditional intracardiac surgical approaches involving CPB have motivated us to develop image-guided surgical techniques for safe and accurate intracardiac procedures without CPB using real time 3-D ultrasound for image guidance. [Read More] |
|
 |
|
|
3D Ultrasound Guided Intracardiac Surgery
Many investigators now recognize that cardiopulmonary bypass (CPB) poses significant risks to the patient. Furthermore, during reconstructive surgical procedures inside the heart, with the use of CPB and cardiac arrest, a repair is done inside a relaxed heart which can be easily distorted with surgical retractors. This makes evaluation of the current geometry relative to the reconstructive ideal quite challenging, particularly for mitral valve surgery. Recognition of these problems with traditional intracardiac surgical approaches involving CPB have motivated us to develop image-guided surgical techniques for safe and accurate intracardiac procedures without CPB using real time 3-D ultrasound for image guidance. For this development effort, we have focused on two of the most common intracardiac surgical procedures: atrial septal defect closure in children and mitral valve annuloplasty for annular dilatation in adults. In preliminary studies, we have used a real time 3-D US system developed by Philips Medical Systems to demonstrate that many of the limitations seen with 2-D imaging to guide surgical tasks can be overcome by 3-D imaging.
|
|
 |
|
References:
Suematsu Y, Martinez J. F., Wolf B. K., Marx G. R., Stoll J. A., DuPont P. E., Howe R. D., Triedman J.K., del Nido P.J. "Three-dimensional echo-guided beating heart surgery without cardiopulmonary bypass: atrial septal defect closure in a swine model." J. Thorac Cardiovasc Surg. 2005 Nov;130(5):1348-57.
Y. Suematsu, G. Marx, J. Stoll, P. Dupont, R. Cleveland, R. Howe, J. Triedman, T. Mihaljevic, B. Mora, B. Savord, I. Salgo and P. del Nido (2004). "Three-dimensional echocardiography-guided beating-heart surgery without cardiopulmonary bypass: A feasibility study," Journal of Thoracic and Cardiovascular Surgery, Vol. 128, No. 4, pp. 571-578.
[Reduce]
|
|
|
| Return to Top |
3D Ultrasound Tracking and Servoing of Surgical Instruments
Difficulty can arise during ultrasound imaging when surgical instruments and tissue structures are imaged simultaneously to achieve precise manipulations. This research project includes: (1) the development of echogenic instrument coatings, (2) the design of passive instrument markers, and (3) the development of algorithms for marker-based instrument tracking and servoing. [Read More] |
|
 |
|
|
3D Ultrasound Tracking and Servoing of Surgical Instruments
Hongliang Ren
, Jeffrey Stoll
Ultrasound imaging is a useful modality for guiding minimally invasive interventions due to its portability and safety. In cardiac surgery, for example, real-time 3D ultrasound imaging is being investigated for guiding repairs of complex defects inside the beating-heart. Substantial difficulty can arise, however, when surgical instruments and tissue structures are imaged simultaneously to achieve precise manipulations. This research project includes: (1) the development of echogenic instrument coatings, (2) the design of passive instrument markers, and (3) the development of algorithms for marker-based instrument tracking and servoing.
For example, a family of passive markers has been developed by which the position and orientation of a surgical instrument can be determined from a single 3D ultrasound volume using simple image processing. Marker-based estimates of instrument pose can be used in augmented reality displays or for image-based servoing. The design principles for marker shapes ensure imaging system and measurement uniqueness constraints are met. Error analysis is used to guide marker design and to establish a lower bound on measurement uncertaintanty. Experimental evaluation of marker designs and tracking algorithms demonstrate a tracking accuracy of 0.7 mm in position and 0.075 rad in orientation.
|
|
 |
|
References:
J. Stoll and P. E. Dupont, " Passive Markers for Tracking Surgical Instruments in Real-time 3D Ultrasound Imaging," IEEE Transactions on Medical Imaging, submitted.
J. Stoll, P. Novotny, P. Dupont and R. Howe, "Real-time 3D Ultrasound-based Servoing of a Surgical Instrument," Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, May 15-19, 2006.
J. Stoll and P. Dupont, "Passive Markers for Ultrasound Tracking of Surgical Instruments," 8th International Conference on Medical Image Computing and Computer Assisted Intervention (MICCAI), Palm Springs, CA, Oct. 26-29, 2005.
J. Cannon, J. Stoll, I. Salgo, H. Knowles, R. Howe, P. Dupont, G. Marx and P. del Nido (2003). "Real Time 3-Dimensional Ultrasound for Guiding Surgical Tasks," Computer Aided Surgery, Vol. 8, No. 2, pp. 82-90.
[Reduce]
|
|
|
Return to Top |
|
|
|
|