When Robots Fly
Researchers study how bats and other flying creatures navigate, as a model for a new kind of robot.
by Jeremy Schwab
Pouring from the mouth of Frio Cave in southwest Texas, thousands of Brazilian free-tailed bats move in what appears to be a chaotic mass. On closer inspection, however—and with the aid of thermal imaging cameras placed strategically nearby—BU researchers can see that the bats' movements are far from random. Performing a series of tight, twisting maneuvers and split-second adjustments, the aerial acrobats manage to avoid colliding with each other and the surrounding vegetation.

A big brown bat (Eptesicus fuscus) is being held by Thomas Kunz in his lab.
Image recorded on a thermal infrared camera by Darren Haley, Indigo Systems Corporation
The question the research team wants to answer is: How do they do it?
A five-year commitment and $7.5 million in United States Navy funding are riding on finding the answer. The goal of the multi-institutional grant project, which began in summer 2010, is to design small robots that fly more like bats, birds, or insects than like planes. Professor of Biology Thomas Kunz and Associate Chair of Computer Science Margrit Betke, along with College of Engineering faculty members John Baillieul, Ioannis Paschalidis, and Calin Belta and several graduate and undergraduate research assistants, are part of a national team working on the grant (the BU portion is $3.1 million). The team also includes researchers from the Universities of North Carolina, Maryland, and Washington. Though not part of the grant team, CAS Professor Alan Strahler and Research Professor Crystal Schaaf, both of the Department of Geography & Environment, provide mapping and imaging assistance using ground-based LIDAR (Light Imaging Detection and Ranging).
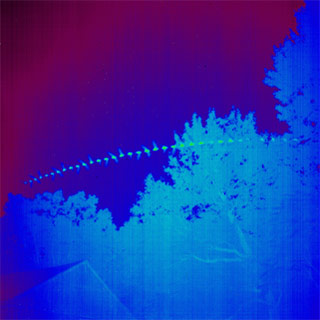
The flight trajectory and wing-beat pattern of a big brown bat along the edge of a forest in central Massachusetts.
Photo by Nathan Fuller and Zheng Wu
Dubbed AIRFOILS (for Animal-Inspired Flight with Outer and Inner Loop Strategies), the project's aim is to create autonomous robots inspired by the movements of bats, birds, and insects. The BU team members are studying bats, while their colleagues at the other institutions study birds and insects. The robots will employ the strategies used by their living counterparts to avoid objects in their path and navigate toward their destination.
The robots would not be drones, flown remotely by human operators; rather, they would be self-guiding vehicles tasked with maneuvering toward pre-set destinations and then gathering intelligence via tiny video cameras and microphones. They could be used for a range of defense and nondefense purposes, from searching for enemy combatants to tracking deforestation.
The researchers stress that they are not trying to re-create animals in robot form, a process called bio-mimicry. "Bats evolved at least fifty million years ago, and have continued to evolve," says Kunz, who is one of the world's foremost experts on bats. "We're never going to be able to mimic those sensory systems and movements in the way that evolution has provided for bats."
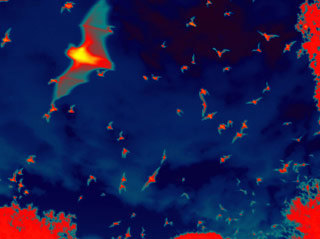
Flying Brazilian free-tailed bats in Texas: yellow indicates the warmest temperature and blue the coolest. Note that the body is warmer than the wings, the clouds and clear sky are cooler than the bat, and the clouds are warmer than the clear sky.
Infrared image by Thomas Kunz and Margrit Betke
The team's more realistic goal is to learn something from the flight paths of bats and the ways they respond to objects and forces in their environment, such as trees and wind. That is where Betke comes in. It is her task to compile and make sense of the massive amount of data collected by the researchers' advanced thermal cameras. She develops computer algorithms that describe the bats' trajectories and movement strategies. The engineers on the team will then use these models to create successive robot prototypes.
It takes all night to download the data from the 70-pound computers that the team lugs across the hot, dusty Texas terrain to connect to their thermal cameras. "We are pushing our abilities to handle dense data sets," says Betke. "We are exploring how far we can push it and how many bats we can track at the same time."■




