The Depth of Depth Measurement

With the ever-increasing development of self-driving cars, consumers should be cautious about what technology is providing the safest and best product. One feature necessary for determining the effectiveness of these devices is depth measurement. If a car is self-driving, it should always have an accurate (and fast) analysis of its surroundings in real time. After all, the road can be an unpredictable and dangerous environment when dealing with other drivers, cargo malfunctions, inclement weather, and emergency response vehicles.
After discovering a new way to improve upon existing technology and methodology for depth measurement, Joshua Rapp, a PhD candidate at BU ECE advised by Associate Professor Vivek Goyal, submitted a paper entitled Improving Lidar Depth Resolution with Dither to the 2018 IEEE International Conference on Image Processing. The work of this BU team, in collaboration with Robin Dawson from Charles Stark Draper Laboratory, won the 3rd Best Student Paper Award at the conference for its exceptional contribution to the field of image processing.
Current systems for measuring depth include a photon-counting lidar (similar to a radar, but using light instead of electromagnetic waves), which works by pulsing a laser and measuring the time-of-flight for reflected photons. However, if the clock measuring the photon detection time uses nanoseconds (coarse) rather than picoseconds (fine), the accuracy of depth measurement is limited.
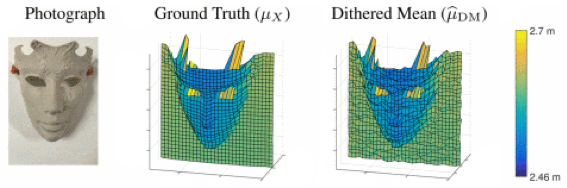
This paper proposes a new approach that can improve depth resolution by using subtractive dither, which pre-adds small delays into the time-of-flight system. Combining this approach with a probabilistic model of photon detection, the resulting depth resolution can be significantly finer than current methods.
Such an improvement could speed up the process of depth imaging for autonomous navigation, airborne terrain mapping, archaeological scanning, forest biomass estimation, and other applications, enabling a higher safety standard for our newer technologies.
About Rapp’s research, Goyal says, “trying to solve the problem of improving depth resolution led us to a wonderful combination of theoretical work on subtractive dither going back decades with lidar technology that is becoming increasingly popular. As soon as we figured out how to add dither to our lidar system, we were very pleased with the improvement in depth resolution. The implementation of dither into a lidar system is simple and could easily be incorporated into the design and manufacturing of photon-counting arrays.”
Congratulations Joshua, and keep up the good work!