IEEE ICRA 2010 Full Day Workshop - Snakes, Worms and Catheters: Continuum and Serpentine Robots for Minimally Invasive Surgery


From SMA Active Endoscope to Micro Catheter
Koji Ikuta
Professor and Director of Biomicro Mechatronics and Robotics Lab.
Department of MicroNano System Engineering
Graduate School of Engineering
Nagoya University
Abstract:
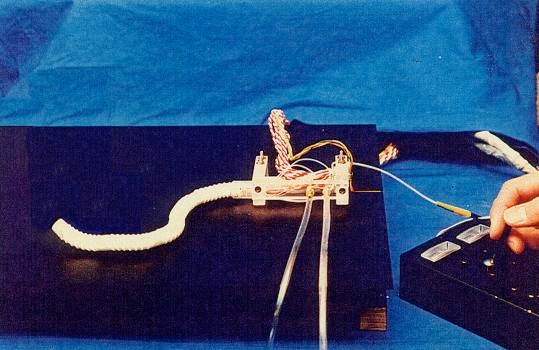
The author has been investigating a series of projects on active snake-like robots for medical applications since 1982. Both new device concepts and new mechatronic technologies have been developed by the author's group. The world's first active endoscope driven by a shape memory alloy servo actuator was demonstrated at Tokyo Institute of Technology in 1986 during Prof. Ikuta's Ph.D research. Active catheters using the same concept were developed later. The electric current-leakage-free active catheter was proposed and developed in 2000. The new idea of micro band-pass valve enabled the realization of multi-degrees of freedom active catheters. Although the original diameter was 2.5 mm, the micro fabrication process developed by us can reduces the size down to 0.3 mm. The most unique features of our research are based on the approach from both new material development and new fabrication processes. The author believes that "new principle based mechatronics" will open the future of medical robotics.
Selected References:
-
1.S.Hirose, K.Ikuta, M.Tuskamoto, "Development of a Shape Memory AlloyActuator (Measurement of Material Characteristics and Development of Active Endoscope)", Advanced Robotics, Vol.4, No.1, pp.3-27, (1990)
-
2.K. Ikuta, M. Nokata, S. Aritomi, "Biomedical Micro Robots Driven by Miniature Cybernetic Actuator", Proc. of IEEE International Workshop on Micro Electro Mechanical System (MEMS-94), pp.263-268 (1994)
-
3.K. Ikuta, "Shape Memory Alloy Servo Actuator System with Electric Resistance Feedback and Application for Active Endoscope", Computer-Integrated Surgery, MIT Press, (1995)
-
4.K.Ikuta, T.Kato, S.Nagata, “Development of micro-active forceps for future microsurgery,” Minimally Invasive Therapy Volume10 Number4/5 October 2001 ISSN 1364-5706,pp.209-213.(2001)
-
5.Koji Ikuta, Hironobu Ichikawa, Katuya Suzuki, "Safety-active Catheter with Multiple-segments Driven by Micro Hydraulic Actuators", In Medical Image Computing and Computer-Assisted Intervention (MICCAI2002),LNCS2488,pp.182-191,2002.
-
6.K.Ikuta, H.Ichikawa, K.Suzuki and D.Yajima, Multi-degree of Freedom Hydraulic Pressure Driven Safety Active Catheter, 2006 IEEE International Conference on Robotics and Automation (ICRA’06), Orlando, Florida, USA, May 15-19, 2006.
-
7.M. Ikeuchi, K. Ikuta, “Membrane Micro Emboss following Excimer Laser Ablation (MeME-X) Process” for Pressure-driven Micro Active Catheter, 21st IEEE International Conference on Micro Electro Mechanical Systems (MEMS2008), Tucson, USA, January 13-17, 2008

Micro-Finger
SMA Active Endoscope

Hydro-pressure active catheter
Relevant Web Links: http://www.bmse.mech.nagoya-u.ac.jp
