IEEE ICRA 2010 Full Day Workshop - Snakes, Worms and Catheters: Continuum and Serpentine Robots for Minimally Invasive Surgery


Modeling, shape sensing, image guidance, and therapeutic applicator integration: Enabling technologies for clinical continuum robots
Robert Webster
Mechanical Engineering
Vanderbilt University
Abstract:
Continuum devices have been key enablers of less invasive surgical and diagnostic access within the human body. The procedures achievable by catheters, bronchoscopes, colonoscopes, etc. illustrate the clinical benefits possible with even relatively simple designs. Thinner and more maneuverable continuum devices promise to enable novel, less-invasive procedures. Coordinating the many degrees of freedom afforded by these new devices often requires a move away from manual control, toward robotic solutions. In the Medical & Electromechanical Design lab at Vanderbilt, we are developing methods of design optimization, sensing, modeling, planning, and real-time control to meet these needs. Though many of our results are broadly applicable, of particular interest to us is one of the thinnest surgical continuum robots developed to date, namely the concentric tube active cannula design.
In particular, we will discuss modeling of continuum robots using rod theory. Recent results account for externally applied forces and moments. In the case of active cannulas, our models also account for general precurvatures of component tubes, and both bending and torsion throughout the device. With respect to shape sensing, we will describe use of self-organizing maps to speed reconstruction of the 3D robot curve from stereo camera images. Toward practical implementation in surgery we will describe use of preoperative medical images to guide the active cannula, enabled by laser surface scans. We will also describe recent motion planning results that determine active cannula configurations 1) to avoid obstacles while reaching a desired target, and 2) within branching lumens in the human lung. Lastly, we will describe initial work toward what appears likely to be the first human clinical application of active cannulas (likely within 2-3 years). We intend to treat large and geometrically complex tumors via acoustically induced hyperthermia, through a single entry point in the organ surface, under three-dimensional ultrasound guidance.
References:
-
1.D. C. Rucker, B. A. Jones, and R. J. Webster III. A Geometrically Exact Model for Externally Loaded Concentric Tube Continuum Robots. IEEE Transactions on Robotics. (Accepted)
-
2.R. J. Webster III and B. A. Jones. Design and Modeling of Constant Curvature Continuum Robots: A Review. International Journal of Robotics Research. (Accepted)
-
3.D. C. Rucker, R. J. Webster III, G. S. Chirikjian, and N. J. Cowan. Equilibrium Conformations of Concentric-Tube Continuum Robots. International Journal of Robotics Research. (Accepted)
-
4.D. C. Rucker and R. J. Webster III. Parsimonious Evaluation of Concentric-Tube Continuum Robot Equilibrium Conformation. IEEE Transactions on Biomedical Engineering, 56(9), 2308-2311, 2009.
-
5.D. C. Rucker, J. M. Croom, and R. J. Webster III. Aiming Surgical Lasers With an Active Cannula. ASME Journal of Medical Devices, 3(2), pp. 027506, 2009. (Abstract only)
-
6.R. J. Webster III, J. M. Romano, and N. J. Cowan. Mechanics of Precurved-Tube Continuum Robots. IEEE Transactions on Robotics, 25(1), 67-78, 2009.
-
7.R. J. Webster III, J. S. Kim, N. J. Cowan, G. S. Chirikjian, and A. M. Okamura. Nonholonomic Modeling of Needle Steering, International Journal of Robotics Research, 25(5–6), 509-525, 2006.
-
8.D. C. Rucker, B. A. Jones, and R. J. Webster III. A Model for Concentric Tube Continuum Robots Under Applied Wrenches. IEEE International Conference on Robotics and Automation. (Accepted)
-
9.L. A. Lyons, R. J. Webster III, and R. Alterovitz. Planning Active Cannula Configurations Through Tubular Anatomy. IEEE International Conference on Robotics and Automation. (Accepted)
-
10.R. A. Lathrop, D. C. Rucker, and R. J. Webster III. Guidance of a Steerable Cannula Robot in Soft Tissue Using Preoperative Imaging and Conoscopic Surface Contour Sensing. IEEE International Conference on Robotics and Automation. (Accepted)
-
11.J. M. Croom, D. C. Rucker, J. M. Romano, and Robert J. Webster III. Visual Sensing of Continuum Robot Shape Using Self-Organizing Maps. IEEE International Conference on Robotics and Automation. (Accepted)
-
12.J. Das, D. C. Rucker, and R. J. Webster III. A Testbed for Multi-Lumen Steerable Needle Experiments. ASME Design of Medical Devices Conference. (Accepted).
-
13.E. C. Burdette, D. C. Rucker, P. Prakash, C. J. Diederich, J. M. Croom, C. Clarke, P. J. Stolka, T. Juang, E. M. Boctor, and R. J. Webster III. The ACUSITT Ultrasonic Ablator: The First Steerable Needle with an Integrated Interventional Tool. Proceedings of SPIE 2010. (Accepted)
-
14.E. M. Boctor, P. Stolka, C. Clarke, D. C. Rucker, J. M. Croom, E. C. Burdette, and R. J. Webster III. Precisely Shaped Acoustic Ablation of Tumors Utilizing Steerable Needle and 3D Ultrasound Image Guidance. Proceedings of SPIE 2010. (Accepted)
-
15.L. A. Lyons, R. J. Webster III, and R. Alterovitz. Motion Planning for Active Cannulas. IEEE/RSJ International Conference on Intelligent Robots and Systems, 801–806, 2009.
-
16.D. C. Rucker and R. J. Webster III. Mechanics of Bending, Torsion, and Variable Precurvature in Multi-Tube Active Cannulas. IEEE International Conference on Robotics and Automation, 2533-2537, 2009.
-
17.R. J. Webster III, J. P. Swensen, J. M. Romano, and N. J. Cowan. Closed-Form Differential Kinematics for Concentric-Tube Continuum Robots with Application to Visual Servoing. 11th International Symposium on Experimental Robotics 2008, Springer Tracts in Advanced Robotics 2009, 54, 485-494, 2008.
-
18.D. C. Rucker and R. J. Webster III. Mechanics-Based Modeling of Bending and Torsion in Active Cannulas. IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, 704-709, 2008.
-
19.R. J. Webster III, J. M. Romano, and N. J. Cowan. Kinematics and Calibration of Active Cannulas. IEEE International Conference on Robotics and Automation, 3888-3895, 2008.
-
20.R. J. Webster III, A. M. Okamura, and N. J. Cowan. Toward Active Cannulas: Miniature Snake-Like Surgical Robots. IEEE/RSJ International Conference on Intelligent Robots and Systems, 2857-2863, 2006.
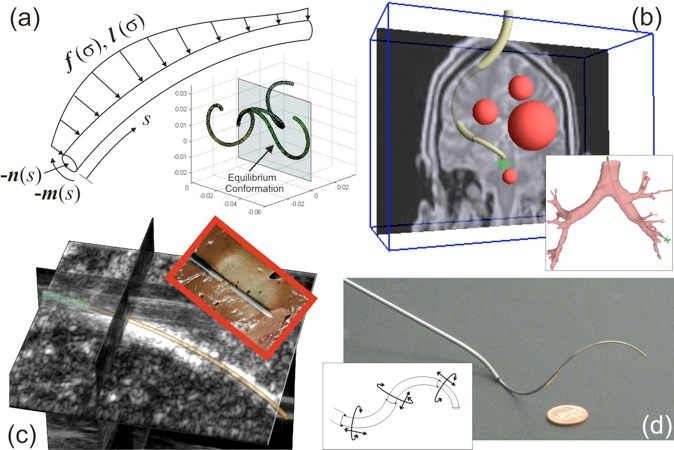
Figure Caption: (a) The most general mechanics-based models of active cannula shape account for point and distributed forces and moments along the robot, and can also handle general precurved tube shapes. (b) Motion planners have been developed which plan paths in the presence obstacles (e.g. for brain surgery) and within tubes (e.g. for lung biopsy). (c) Recent soft tissue applications include acoustic ablation under 3D ultrasound guidance for liver cancer treatment. (d) Photograph of a prototype active cannula composed of three precurved Nitinol tubes with a line drawing showing degrees of freedom.
Relevant Web Links: http://research.vuse.vanderbilt.edu/MEDLab/
